















Рекомендации по контролю точности на различных этапах фотограмметрической обработки в системе PHOTOMOD
Тема: технологии выполнения фотограмметрических работ
Автор: Служба технической поддержки, «Ракурс», обновлено 01.12.2022.
Данное руководство базируется на «Инструкции по фотограмметрическим работам при создании цифровых топографических карт и планов» (Москва, ЦНИИГАиК, 2002), утвержденной Федеральной службой геодезии и картографии России.
Система PHOTOMOD позволяет производить контроль выполненных операций на всех этапах обработки проекта. Ниже приведен список рекомендаций и допусков на различных этапах работы с проектом.
1.1 Редактор камер. Внутреннее ориентирование.
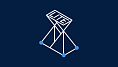
После добавления снимков в проект, необходимо завести камеру в Редакторе камер и выполнить внутреннее ориентирование снимков. Этот процесс различается для аналоговых и цифровых камер.Для изображений, полученных аналоговой камерой, внутреннее ориентирование выполняется путем измерения координатных меток на полях снимков. В случае наличия координат меток вычисляются ошибки внутреннего ориентирования вдоль обеих осей.
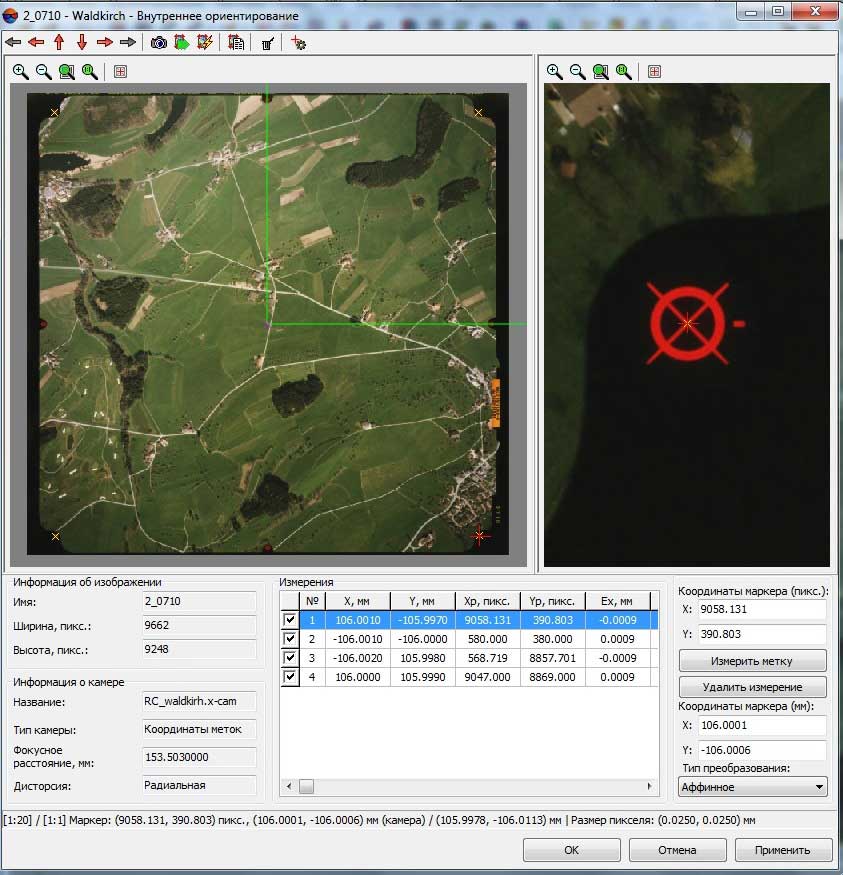

Рис. 1.1. Внутреннее ориентирование
Если сканирование выполнялось фотограмметрическим сканером, то допустимое значение максимальной ошибки не должно превышать размер пиксела. То есть, если в результате сканирования размер пиксела составляет 12 мкм, то максимальная ошибка не должна превышать этого значения.
Для изображений, полученных цифровой камерой, внутреннее ориентирование выполняется в автоматическом режиме и сводится к вводу элементов внутреннего ориентирования из паспорта камеры.
1.2 Измерение точек сети триангуляции
Процесс взаимного ориентирования подразумевает:
- измерение связующих точек на стереопарах и в зонах тройного перекрытия;
- измерение межмаршрутных связующих точек;
- распознавание и измерение опорных точек.
При определении элементов взаимного ориентирования оптимальным вариантом считается измерение 12-18 связующих точек на стереопаре (по 2-3 точки в каждой из 6 стандартных зон, см. рис 1.2), если измерения выполняются вручную. При автоматическом измерении связующих точек мы можем задавать большее количество точек для измерения на каждой стереопаре, и за счет этого равномерно распределять их по области перекрытия с учетом особенностей снимаемого объекта. Смотри рис. 1.3.
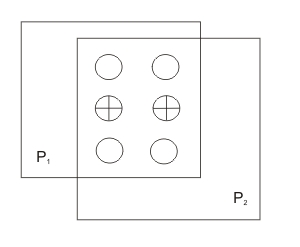

Рис. 1.2. Схема расположения стандартных зон

Рис. 1.3. Измерение связующих точек по всей области перекрытия стереопары
Также, рекомендуется следить, чтобы точки, попадающие в зону тройного перекрытия, были, по возможности, распределены равномерно «вдоль» этой зоны.
В ЦФС PHOTOMOD рекомендуется выполнять измерение связующих точек в автоматическом режиме. Сначала необходимо построить накидной монтаж блока в основном окне проекта, используя окно «Накидной монтаж» (рис. 1.4).
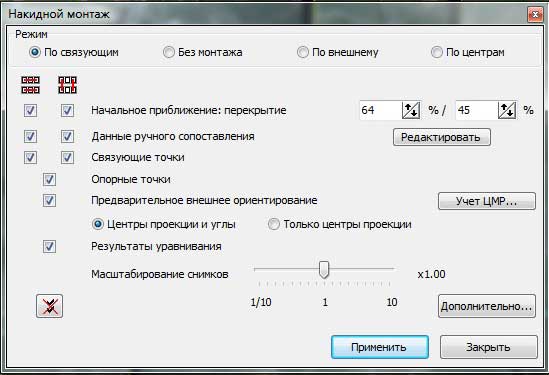

Рис. 1.4. Настройка параметров для создания накидного монтажа
Затем, запустив окно «Автоматическое измерение связующих точек», задаем параметры измерения, переноса и фильтрации точек (рис. 1.5)
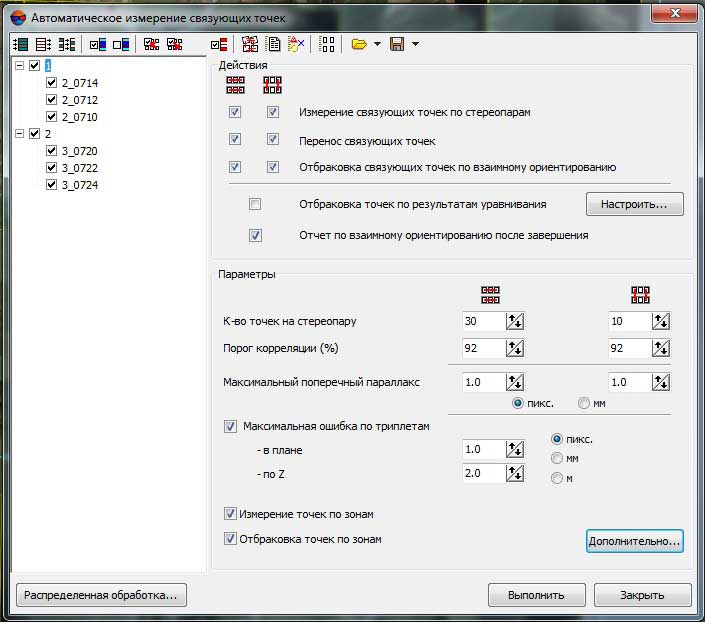

Рис. 1.5. Настройка параметров для автоматического измерения связующих точек
Здесь необходимо выставить пороговые значения величин, которые позволят нам провести контроль качества выполненных измерений на всех этапах создания сети фототриангуляции:
1. по коэффициенту корреляции
При добавлении точек в автоматическом режиме или вручную с использованием коррелятора происходит расчет значения коэффициента корреляции, его значение отображается в таблице «Точки триангуляции» окна «Измерение точек» Смотри рис. 1.6.
Приемлемое значение коэффициента корреляции определяется пользователем, исходя из фотографического качества снимков. Для контрастных и четких снимков это значение составляет 0,9 — 0,95, для снимков с большим смазом допустимое значение коэффициента может быть 0,80 на хорошо распознаваемых точках.
2. по остаточным поперечным параллаксам
После измерения 5 точек на стереопаре вычисляются элементы взаимного ориентирования пары снимков, которые уточняются по мере добавления точек, и в таблице «Точки триангуляции» (в окне Измерение точек) отображаются значения остаточных поперечных параллаксов на точках в выбранных единицах измерения – миллиметрах или пикселах. Смотри рис. 1.6.
Средняя ошибка не должна превышать половины размера пиксела сканирования для аналоговой камеры и половины размера пиксела матрицы для цифровой камеры. То есть, если размер пиксела сканирования 12 мкм, то средняя ошибка взаимного ориентирования не должна превышать 6 мкм, а при размере пиксела матрицы 9 мкм – 4,5 мкм.* См. также Приложение 1
Таким образом, в описанном случае допуски на максимальные ошибки — 12 мкм и 9 мкм для аналоговой и цифровой камеры соответственно.
3. по плановым и высотным ошибкам на точках в области тройного и более перекрытия
После измерения точек на стереопаре в области двойного перекрытия необходимо перенести на соседние модели точки, попадающие в зону тройного перекрытия. На этих точках рассчитываются ошибки определения координат в соседних моделях. Они отображаются в таблице «Точки триангуляции» в окне «Измерение точек». Смотри рис. 1.6
Средние ошибки в плане не должны превышать половины размера пиксела, умноженного на √2, а по высоте — средней ошибки, умноженной на отношение фокусного расстояния камеры к базису съемки:
Exy ср = √2 · 0,5пикс
Ez ср = f/b · Exy ср
См. также Приложение 1
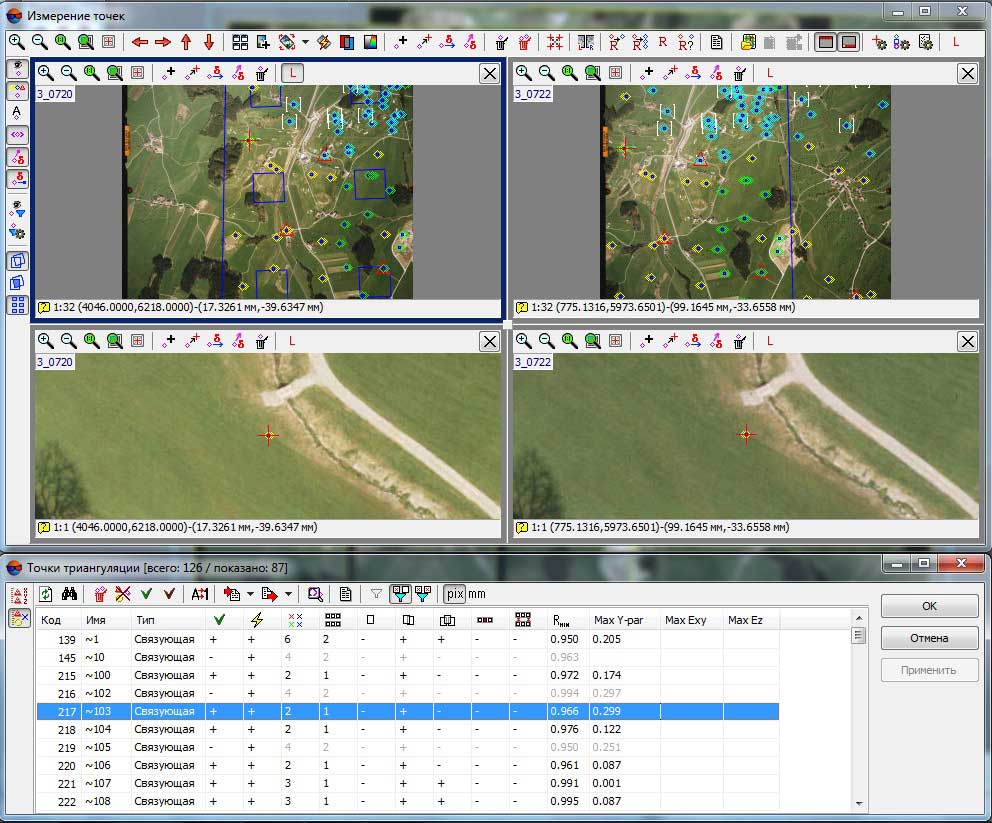

Рис. 1.6. Контроль качества измерений связующих точек триангуляции в окне «Измерение точек»
Приблизительное значение базиса фотографирования можно рассчитать по формулам:
1) bx=lx·(100%-px)/100%
где bx — базис фотографирования в масштабе снимка (мм);
lx — размер снимка вдоль оси X (мм);
px — продольное перекрытие в % (в общем случае 60%).
2) bx = xлев — xправ, где xлев и xправ — координаты связующей точки на левом и правом снимке (мм).
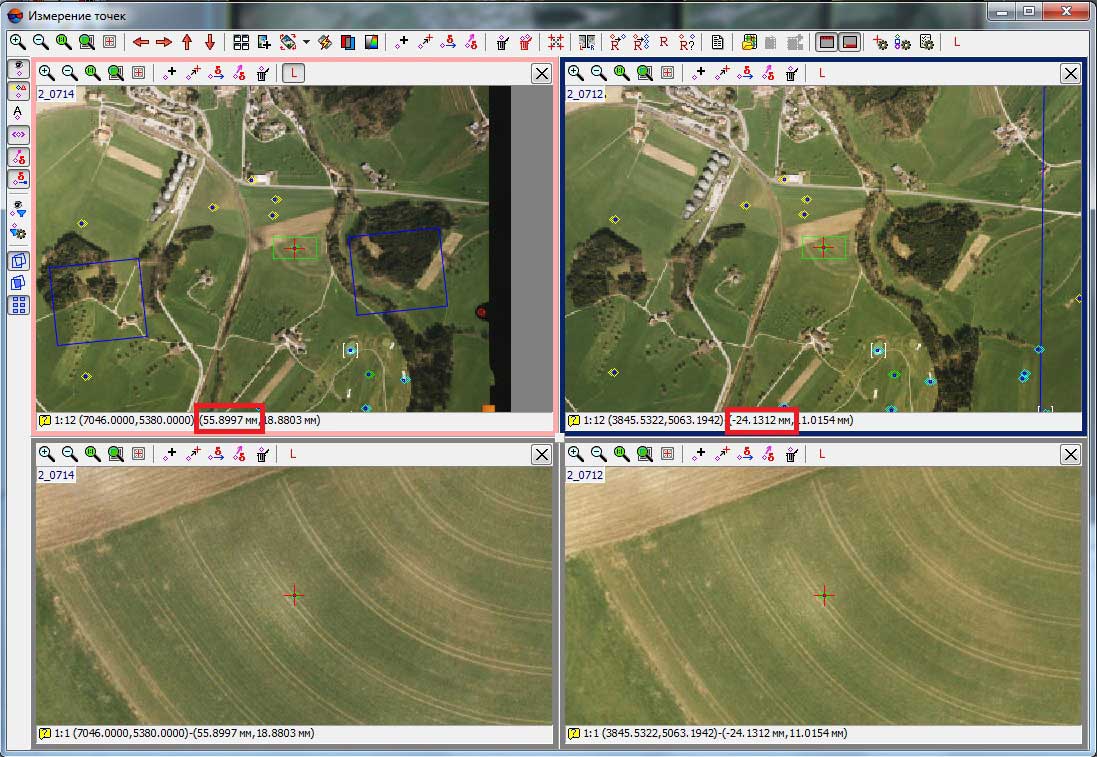

Рис. 1.7. Координаты соответствующей точки на левом и правом изображениях
В таблице 1 приведены краткие характеристики наиболее популярных съемочных систем
|
Камера |
Фокусное расстояние (мм) |
Размер снимка (пкс) |
Размер пикселя (мкм) |
|
БПЛА |
|||
|
Sony RX1 RM2 |
35 |
5304/7952 |
4.5 |
|
Sony A6000 |
20 |
4000/6000 |
4 |
|
DJI FC6310 |
8.8 |
3648/5472 |
2.4 |
|
PhaseOne iXM-100 |
80 |
11664 / 8750 |
3.76 |
|
Профессиональные камеры |
|||
|
UltraCam Eagle M3 |
80 |
26 460 / 17 004 |
4.0 |
|
DMC II250 |
112 |
17 216 / 14 656 |
5.6 |
|
DMCIII |
92 (PAN) 45 (MC) |
25 728 /14 592 (PAN) 8 956/6 708 (MC) |
3.9 (PAN) 6.0 (MC) |
Таблица 1. Краткая характеристика съемочной систем
В таблице 1.1. приведены допуски на средние ошибки в триплетах для изображений формата 23×23 см, полученных аналоговой камерой, с пикселом сканирования 12 мкм, продольным перекрытием 60% и трех стандартных для аналоговых камер фокусных расстояний.
| f (мм) | Средняя ошибка (мм) | |
| в плане | по высоте | |
| 90 | 0,008 | 0,008 |
| 150 | 0,008 | 0,014 |
| 300 | 0,008 | 0,028 |
*Далее при употреблении словосочетания «размер пиксела» имеется в виду размер пиксела сканирования для аналоговых камер и размер пиксела матрицы для цифровых камер.
См. также Приложение 1
В таблице 1.2. приведены средние ошибки в триплетах для изображений, полученных различными цифровыми камерами, с перекрытием 60%.**
| Камера |
Фокусное расстояние f (мм) |
Размер пиксела (мм) |
Формат кадра (пикс)(мм) |
Базис (мм) | Exy ср (мм) | Ez ср (мм) |
| DMC | 120 | 0,012 |
7680x13824 92,2x165,9 |
36,88 | 0,008 | 0,028 |
| DSS | 55 | 0,009 |
4092x4077 36,8x36,7 |
14,8 | 0,006 | 0,024 |
| UltraCamD | 100 | 0,009 |
7500x11500 67,5x103,5 |
27,00 | 0,006 | 0,024 |
| UltraCamX | 100 | 0,007 |
9420x14430 67,8x103,9 |
27,12 | 0,005 | 0,019 |
См. также Приложение 1
**во многих случаях съемка цифровыми камерами производится с продольным перекрытием 80-90%, поэтому соотношение f/b увеличивается, следовательно, увеличиваются и значения ошибок в триплетах по высоте.
После выполнения взаимного ориентирования снимков внутри маршрутов, выполняется измерение межмаршрутных точек.
Рекомендуемая технология ручного измерения межмаршрутных точек:
1) измерить по 2-3 точки на каждую межмаршрутную стереопару (рекомендуется размещать точки в «верхней» и «нижней» части поперечного перекрытия);
2) перенести каждую точку на одно соседнее изображение в каждом маршруте, контролируя значения остаточных поперечных параллаксов на точках внутри каждой стереопары, где была добавлена новая точка (см. таблицу «Точки триангуляции» окна «Измерение точек»). Сводную статистику по открытым изображениям можно увидеть, запустив «Отчет по взаимному ориентированию» из окна «Измерение точек» соответствующей кнопкой панели инструментов.
После измерения межмаршрутных точек, необходимо проконтролировать взаимное ориентирования снимков по всему блоку.
В случае автоматического измерения связующих точек после завершения работы алгоритма выдается Отчет по взаимному ориентированию, где приведена статистика по внутримаршрутным и межмаршрутным измерениям по всему блоку.
Также он может быть открыт из основного окна проекта соответствующим пунктом меню «Ориентирование» или соответствующей кнопкой панели инструментов «Триангуляция». Сначала открывается окно «Параметры отчета по взаимному ориентированию», где необходимо задать допустимые значения остаточного поперечного параллакса и ошибок в триплетах и указать единицы измерения. Затем открывается отчет, где цветом будут отмечены превышения допусков. В случае необходимости, из этого окна можно открыть проблемную стереопару или триплет и отредактировать измерения.
После выполнения и контроля ошибок взаимного ориентирования (ошибки не превышают заданных допусков), переходим к уравниванию блока.
2. Уравнивание блока (PHOTOMOD Solver)
На данном этапе выполняется уравнивание блочных и маршрутных сетей фототриангуляции. Сначала рекомендуется произвести уравнивание без участия опорных точек, то есть уравнять в свободной модели. В ходе уравнивания будут определены ошибки по связи, которые характеризуют качество фотограмметрических измерений.
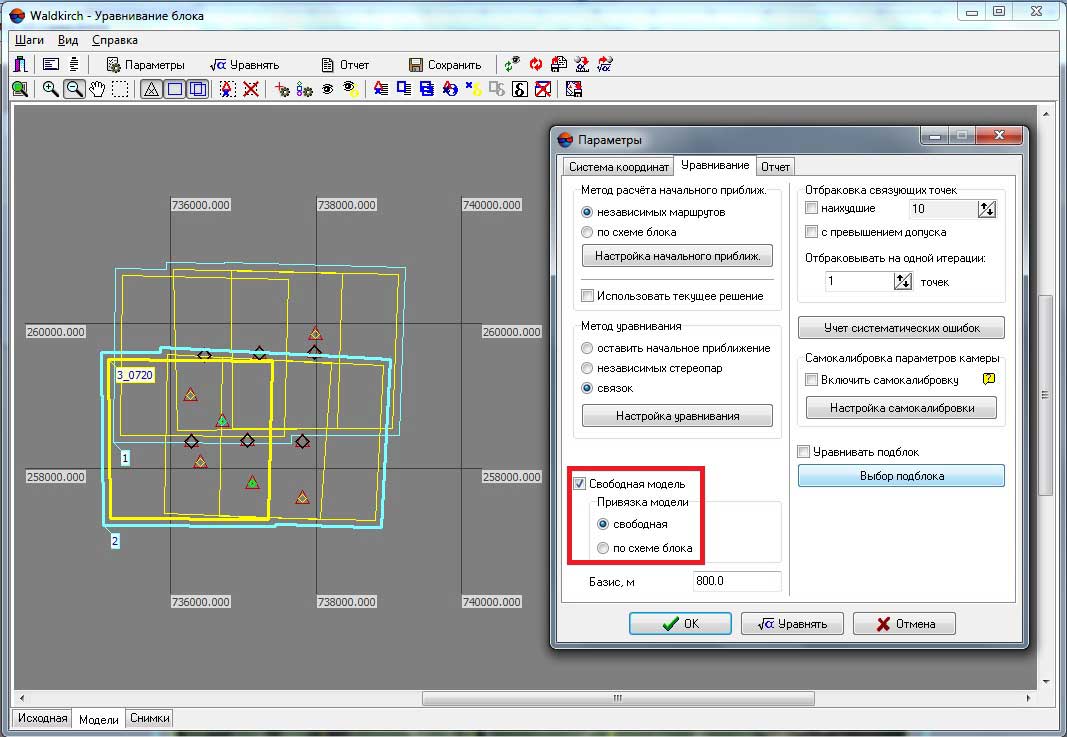

Рис. 2.1. Уравнивание в свободной модели
Чтобы оценить ожидаемую точность при уравнивании с использованием опорных точек, необходимо задать базис фотографирования в метрах в окне Параметры на закладке Уравнивание. Здесь же выбирается метод уравнивания.
Если при уравнивании в свободной модели были получены результаты, удовлетворяющие заданной точности, можно переходить к уравниванию с использованием опорных точек. Ожидаемая точность этого уравнивания будет не выше точности, полученной при уравнивании свободной модели.
Ниже приведены допуски на те или иные ошибки уравнивания в зависимости от конечного продукта обработки — топографические карты, ортофотопланы.
2.1. Точность уравнивания при создании топографических карт
Опорные точки
Средняя ошибка на опорных точках после внешнего ориентирования не должна превышать 0,2 мм в масштабе карты (плана) в плане и 0,15hсеч по высоте, где hсеч — высота сечения рельефа для масштаба создаваемой карты.
Контрольные точки
Средняя ошибка планового положения — 0,3 мм в масштабе карты (плана)
Средняя ошибка по высоте на контрольных точках:
1) 0,2·hсеч — при съемке с высотой сечения 1 м, а также при съемке с высотой сечения 0,5 м для масштабов 1:500 и 1:1000;
2) 0,25·hсеч — при съемке с высотой сечения 2,5 м, а также при съемке с высотой сечения 0,5 м для масштаба 1:2000;
3) 0,35·hсеч — при съемке с высотой сечения 5 м и 10 м.
| Масштаб | hсеч | ||||
| Допуск | |||||
| опорные | контрольные | ||||
| в плане | по высоте | в плане | по высоте | ||
| 1:2000 | 1 | 0,4 | 0,15 | 0,6 | 0,2 |
| 1:10000 | 2,5 | 2 | 0,38 | 3 | 0,625 |
| 1:25000 | 5 | 5 | 0,75 | 7,5 | 1,75 |
См. также Приложение 1
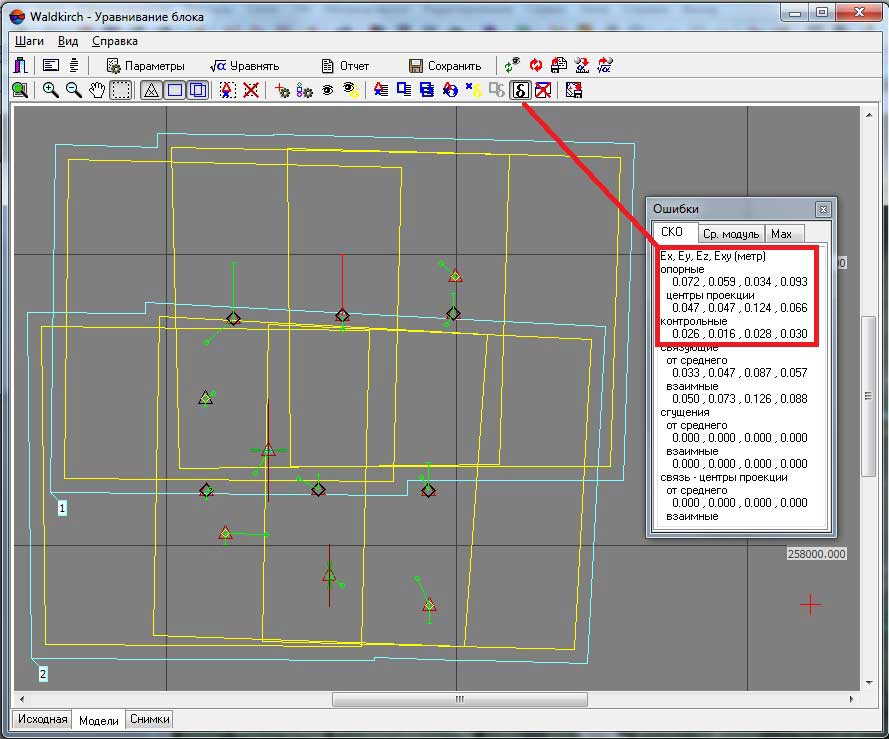

Рис. 2.2. Контроль средних ошибок уравнивания на опорных и контрольных точках
2.2. Точность уравнивания при создании ортофотопланов
Опорные точки
Средняя ошибка в плане — 0,2 мм в масштабе создаваемой карты (плана).
Средняя ошибка по высоте — 1/3ΔhЦМР, где ΔhЦМР — средняя ошибка ЦМР.
Контрольные точки
Средняя ошибка в плане — 0,3 мм в масштабе создаваемой карты (плана).
Средняя ошибка по высоте — 1/3ΔhЦМР, где ΔhЦМР — средняя ошибка ЦМР.
Допуски на ошибку ΔhЦМР смотрите в разделе документации «Обработка проекта» — «Создание цифровой модели рельефа».
В таблице 2.2.1. Приведены допуски на средние ошибки уравнивания при создании ортофотопланов по цифровым снимкам
|
Масштаб |
Камера |
Допуск (м) |
|||
|
Опорные |
Контрольные |
||||
|
В плане |
По высоте |
В плане |
По высоте |
||
|
1:2000 |
Sony RX1 RM2 |
0,4 |
0,32 |
0,6 |
0,32 |
|
Sony A6000 |
0,27 |
0,27 |
|||
|
DJI FC6310 |
0,22 |
0,22 |
|||
|
PhaseOne iXM-100 |
0,58 |
0,58 |
|||
|
UltraCam Eagle M3 |
0,25 |
0,25 |
|||
|
DMC II250 |
0,35 |
0,35 |
|||
|
DMCIII |
0,26 |
0,26 |
|||
|
1:10000 |
Sony RX1 RM2 |
2 |
1,63 |
3 |
1,63 |
|
Sony A6000 |
1,38 |
1,38 |
|||
|
DJI FC6310 |
1,12 |
1,12 |
|||
|
PhaseOne iXM-100 |
2,92 |
2,92 |
|||
|
UltraCam Eagle M3 |
1,27 |
1,27 |
|||
|
DMC II250 |
1,77 |
1,77 |
|||
|
DMCIII |
1,33 |
1,33 |
|||
|
1:25000 |
Sony RX1 RM2 |
5 |
4,01 |
7,5 |
4,01 |
|
Sony A6000 |
3,47 |
3,47 |
|||
|
DJI FC6310 |
2,79 |
2,79 |
|||
|
PhaseOne iXM-100 |
7,3 |
7,3 |
|||
|
UltraCam Eagle M3 |
3,18 |
3,18 |
|||
|
DMC II250 |
4,09 |
4,09 |
|||
|
DMCIII |
3,33 |
3,33 |
|||
В таблице 2.2.2. приведены допуски на средние ошибки уравнивания на опорных и контрольных точках для создания ортофотопланов по аналоговым снимкам формата 23x23 см.
| Масштаб | f (мм) | ||||
| Допуск | |||||
| опорные | контрольные | ||||
| в плане | по высоте | в плане | по высоте | ||
| 1:2000 |
90 150 300 |
0,4 |
0,13 0,22 0,45 |
0,6 |
0,13 0,22 0,5 |
| 1:10000 |
90 150 300 |
2 |
0,67 1,12 2,24 |
3 |
0,67 1,12 2,24 |
| 1:25000 |
90 150 300 |
5 |
1,68 2,80 5,59 |
7,5 |
1,68 2,80 5,59 |
См. также Приложение 1
Средние ошибки на опорных и контрольных точках после уравнивания для создания ортофотопланов по цифровым снимкам:
| Масштаб | Камера | ||||
| Допуск | |||||
| опорные | контрольные | ||||
| в плане | по высоте | в плане | по высоте | ||
| 1:2000 |
DMC DSS UltraCamD UltraCamX |
0,4 |
0,27 0,51 0,36 0,36 |
0,6 |
0,27 0,51 0,36 0,36 |
| 1:10000 |
DMC DSS UltraCamD UltraCamX |
2 |
1,37 2,57 1,80 1,79 |
3 |
1,37 2,57 1,80 1,79 |
| 1:25000 |
DMC DSS UltraCamD UltraCamX |
5 |
3,43 6,42 4,50 4,48 |
7,5 |
3,43 6,42 4,50 4,48 |
См. также Приложение 1
3. Построение ЦМР
Цифровая модель рельефа (ЦМР) характеризуется ошибкой по оси Z, допуск на которую зависит от выходного продукта фотограмметрической обработки. Ниже приведены таблицы допусков в зависимости от масштаба выходного ортофотоплана и параметров съемочной системы.
Допуск на среднюю ошибку ЦМР ΔhЦМР при построении ортофотоплана рассчитывается по следующей формуле:
ΔhЦМР = (0,3 мм · f · М)/r где 0,3мм — графическая точность топографической карты (плана);
f — фокусное расстояние съемочной камеры (мм);
M — знаменатель масштаба создаваемой карты (плана);
r — максимальное удаление точки снимка от точки надира (мм), равное половине диагонали рабочей зоны.
Значения радиуса рабочей зоны для цифровых снимков, полученных различными камерами при съемке с 60%-ым перекрытием.
Для аналоговых снимков формата 23×23 см при продольном перекрытии 60% область перекрытия имеет размеры 13,8×23 см. Таким образом, радиус r приблизительно равен 124 мм.
В таблице 3.1 приведены допуски на средние ошибки ΔhЦМР(м) для радиуса рабочей площади аналоговых снимков 124 мм в зависимости от масштаба создаваемой карты и фокусного расстояния.
| Масштаб | Фокусное расстояние (мм) | ||
| 90 | 150 | 300 | |
| 1:2000 | 0,4 | 0,7 | 1,3 |
| 1:10000 | 2,0 | 3,4 | 6,7 |
| 1:25000 | 5,0 | 8,4 | 16,8 |
См. также Приложение 1
В таблице 3.2. приведены значения радиуса рабочей зоны для цифровых снимков, полученных различными камерами при съемке с 60%-ым перекрытием.
|
Камера |
Формат кадра (пикс) (мм) |
Базис (мм) |
Радиус рабочей зоны (мм) |
|
Sony RX1 RM2 |
5304/7952 |
9,55 |
21,5 |
|
Sony A6000 |
4000/6000 16/24 |
6,4 |
14,42 |
|
DJI FC6310 |
3648/5472 8,75/13,13 |
3,5 |
7,89 |
|
PhaseOne iXM-100 |
11664 / 8750 43,85/32,81 |
17,54 |
27,38 |
|
UltraCam Eagle M3 |
26 460 / 17 004 |
42,336 |
62,9 |
|
DMC II250 |
17 216 / 14 656 |
38,56 |
63,3 |
|
DMC III |
8 956/6 708 53,73/40,25 |
21,49 |
33,57 |
В таблице 3.3. приведены допуски на средние ошибки ΔhЦМР(м) для цифровых снимков с 60% перекрытием, полученных различными камерами, в зависимости от масштаба выходного ортофотоплана.
|
Масштаб |
Допуск (м) |
||||||
|
Камера |
|||||||
|
Sony RX1 RM2 |
Sony A6000 |
DJI FC6310 |
PhaseOne iXM-100 |
UltraCam Eagle M3 |
DMC II250 |
DMC III |
|
|
1:2 000 |
0,96 |
0,83 |
0,67 |
1,75 |
0,76 |
1,06 |
0,8 |
|
1:10 000 |
4,88 |
4,16 |
3,35 |
8,76 |
3,81 |
5,31 |
4,0 |
|
1:25 000 |
12,02 |
10,4 |
8,36 |
21,91 |
9,53 |
12,27 |
10,0 |
См. также Приложение 1
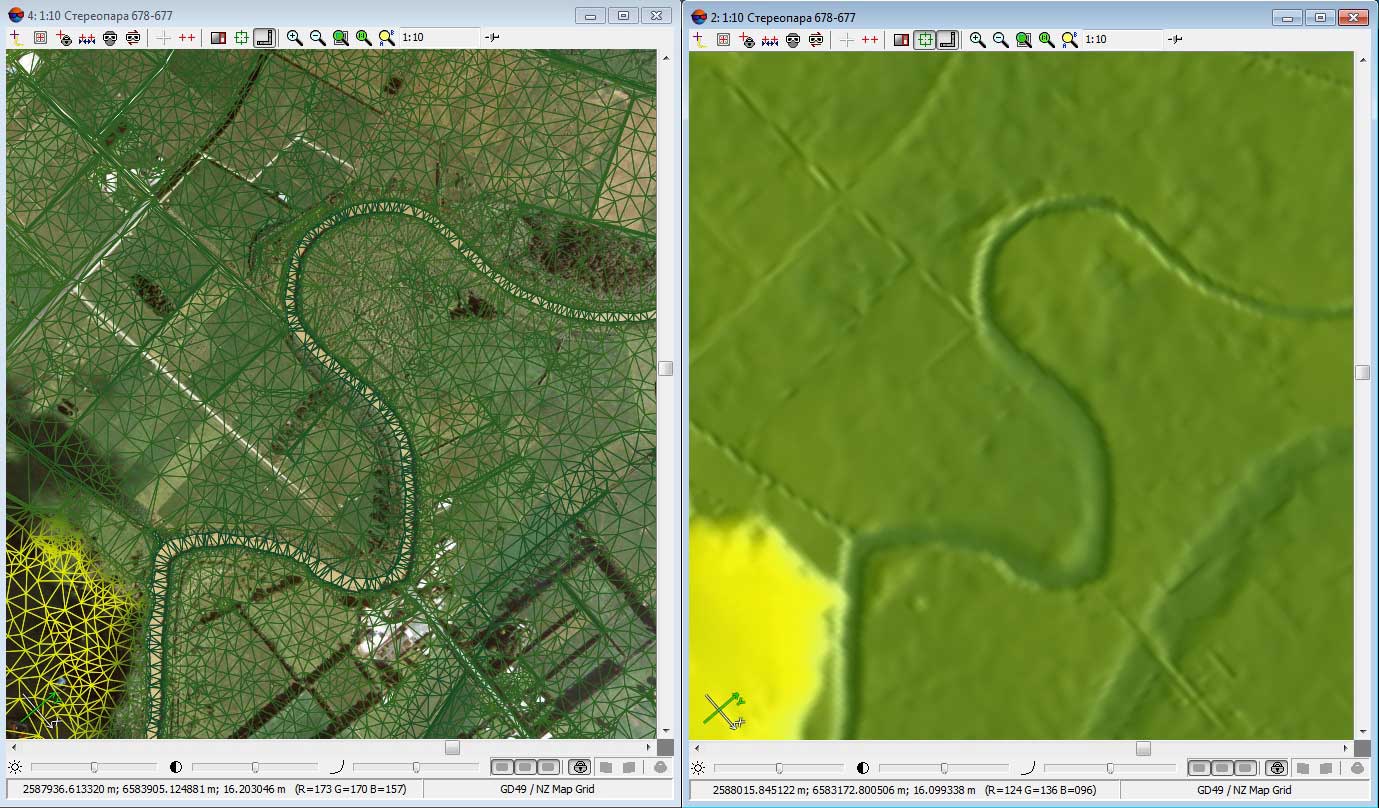

Рис. 3.1. ЦМР в виде TIN и матрицы высот
4. Построение ортофотоплана (PHOTOMOD Mosaic)
Контроль точности ортофотоплана осуществляется по опорным/контрольным точкам и по линиям совмещения фрагментов (порезам).
Допуск на ошибку в плановом положении опорных и контрольных точек составляет 0,5 мм в масштабе фотоплана для равнинных и всхолмленных районов и 0,7 мм — для горных.
Допуски на несовмещение контуров по порезам составляют 0,7 мм и 1 мм в масштабе создаваемого фотоплана для равнинных и горных районов соответственно.
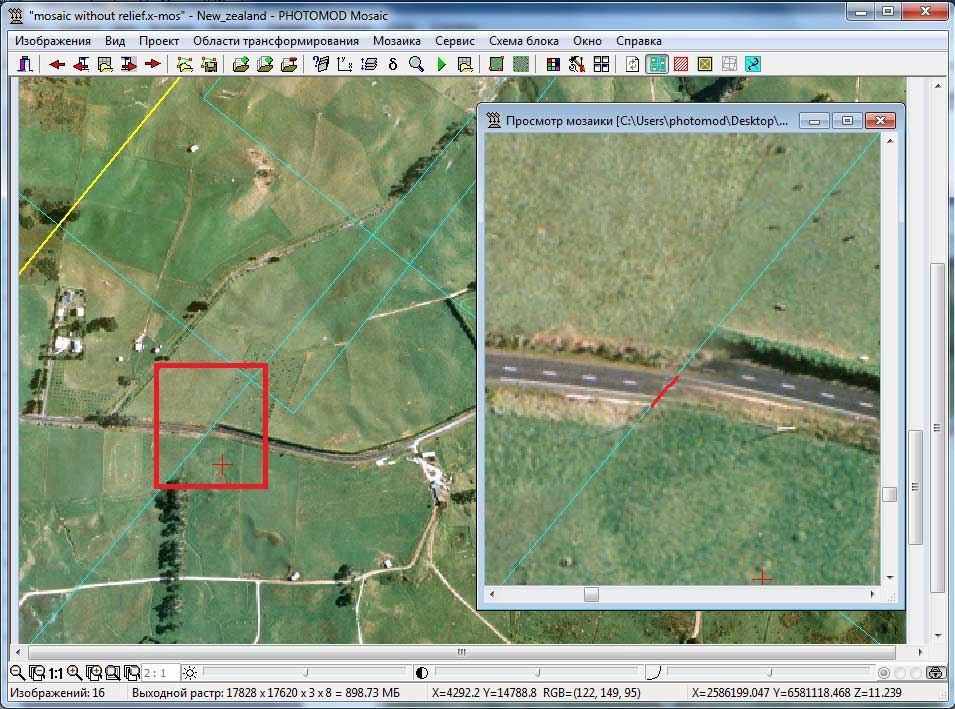

Рис. 4.1. Несовмещение контуров по порезам
PHOTOMOD Mosaic позволяет осуществить контроль фотоплана по опорным и контрольным точкам автоматически (кнопка Контроль точности). Ниже приведены допуски на ошибки в плановом положении опорных и контрольных точек в зависимости от масштаба ортофотоплана.
| Масштаб | Средняя ошибка (м) | |
| Равнинная местность | Горная местность | |
| 1:2000 | 1 | 1,4 |
| 1:10000 | 5 | 7 |
| 1:25000 | 12,5 | 17,5 |
См. также Приложение 1
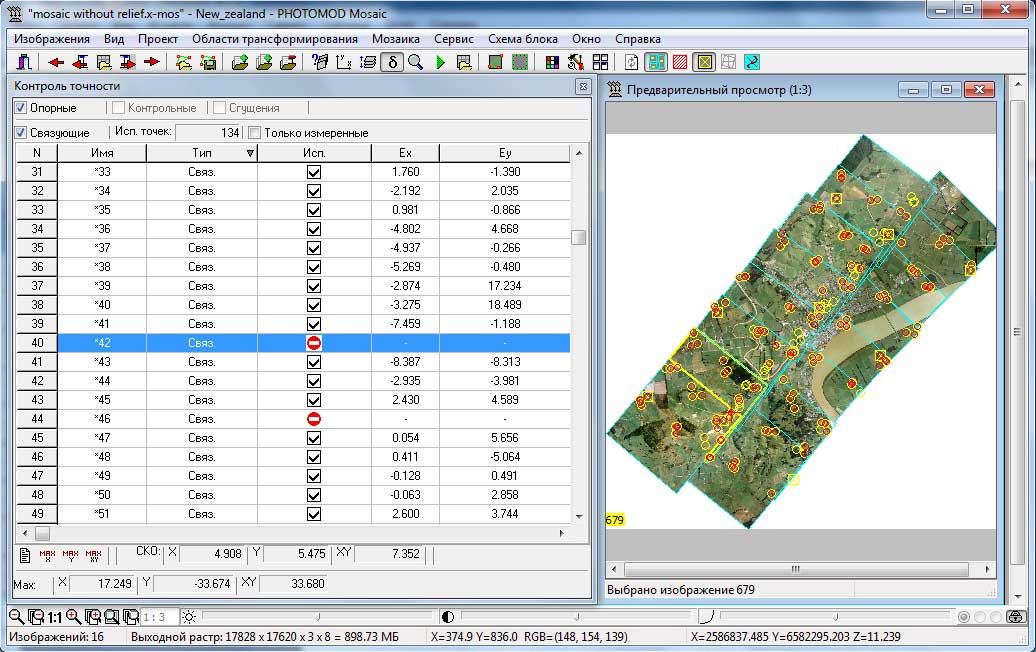

Рис. 4.2. Автоматический контроль точности по точкам сети фототриангуляции
ПРИЛОЖЕНИЕ 1.
Примерное соотношение средней, среднеквадратической и максимальной ошибок:
Emax ≈ 2·Eср ; СКО ≈ √2·Eср
Литература
1. А. Н. Лобанов, М. И. Буров, Б. В. Краснопевцев. Фотограмметрия. М.: «Недра», 1987.
2. А. П. Михайлов, А. Г. Чибуничев. Лекции по фотограмметрии. М., 2005.
3. Инструкция по фотограмметрическим работам при создании цифровых топографических карт и планов. М.: ЦНИИГАиК, 2002.