















Оценка точности ориентирования снимков Pleiades.
Тема: обработка данных космической съемки
Автор: П.С. Титаров, «Ракурс», Москва, Россия. 2013.
Продукт TRISTEREO компании Astrium — это триплет снимков Pleiades, состоящий из «классической стереопары» и дополнительного надирного снимка, полученных с одного витка. Продукт TRISTEREO позволяет создавать более точные стереомодели горных областей и территорий с плотной высотной застройкой, так как наличие дополнительного снимка снижает вероятность появления «мертвых зон».
Cтатья П.С. Титарова «Оценка точности ориентирования снимков Pleiades» открывает цикл публикаций, посвященных тестированию данных. Об оценке возможности создания цифровых топографических карт и планов на основе космических снимков Pleiades читайте в статье Е.А. Кобзевой.
1. Набор данных для исследования
Набор тестовых данных включает в себя триплет (tristereo) снимков Pleiades, а также абрисы и координаты точек для использования их в качестве опорных и контрольных. Снимки представляют собой продукт Primary; из поставленных в виде отдельных продуктов панхроматического и мультиспектрального снимка (опция Bundle) средствами PHOTOMOD были созданы синтезированные цветные растры высокого разрешения. Дополнительные сведения об этих снимках можно найти в Таблице 1.
Таблица 1. Сведения о снимках, используемых в исследовании
| Параметры |
Снимки
|
||
| Идентификатор | DS_PHR1A_201306010719183 _SE1_PX_E060N56_0920_01800 | DS_PHR1A_201306010719416 _SE1_PX_E060N56_0920_01876 | DS_PHR1A_201306010719523 _SE1_PX_E060N56_0920_01876 |
| Дата и время съёмки | 2013-06-01 07:19:53.4 | 2013-06-01 07:20:16.6 | 2013-06-01 07:20:27.4 |
| Отклонение от надира вдоль трассы | 10.0814920774967 | -2.723891146904688 | -8.549548900017667 |
| Отклонение от надира поперек трассы | 1.423702278936946 | 1.891971903907262 | 2.094985073020628 |
Что касается наземных координат опорных точек, они были получены из различных источников (полевые измерения различной точности и отсканированные планшеты цифровых топографических планов), соответственно и точность наземных координат неодинакова и находится в пределах 0.2-1.0 м в плане и в таких же пределах по высоте.
Измерение точек на снимках было выполнено с ошибкой около 1 пикселя. Учитывая, что поставляемые растры приводятся к размеру пикселя 0.5 м, это значение можно считать оценкой погрешности, вносимой неточностью измерений точек на снимках. Однако в дальнейшем, оценивая достигнутую в различных экспериментах точность уравнивания, следует иметь в виду, что разрешение «сырых» снимков Pleiades составляет 0.7 м.
Схема расположения измеренных точек на снимке, как с известными координатами на местности, так и связующих, приведена на Рисунке 1.
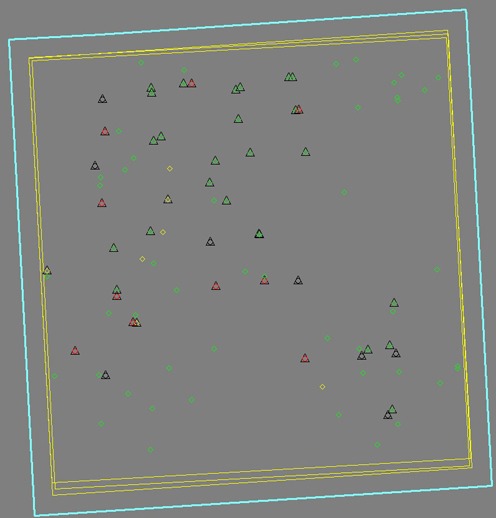 |
| Рисунок 1. Схема расположения точек, используемых при уравнивании |
2. Цель и методология исследований
Целью исследования является определение наиболее эффективного метода ориентирования и оптимального количества опорных точек, оценка достижимой точности ориентирования, и выявление других особенностей уравнивания (проявляющихся при уравнивании одиночных снимков, стереопар и триплетов, с использованием связующих точек или без них).
При исследовании проводилось уравнивание проектов в соответствии со схемами, описанными в Таблице 2. Каждая схема задает тестируемую геометрическую модель снимка и тип поправок к ней, и определяет способ использование опорных, контрольных и связующих точек. Цель проверки в соответствии с каждой схемой также указана в Таблице 2.
Кроме того, схемы сгруппированы следующим образом.
Схемы I и II предназначены для оценки точности, достижимой при использовании RPC и отсутствии наземных опорных точек.
Схема III соответствует случаю, когда количество опорных точек минимально.
Схемы IV и V рассматривают возможности уравнивания в случае, когда набор опорных точек соответствует принципу «априорной разумной достаточности»; не делая преждевременных выводов о том, не является ли используемое количество опорных точек излишним, или возможно ли повысить точность уравнивания увеличением их числа, следует, тем не менее, отметить, что при работе со многими съёмочными системами примерно такой вариант позволяет достичь наилучших результатов при уравнивании по RPC.
Схемы VI и VII как раз и предназначены для прояснения вопроса, можно ли существенно повысить точность уравнивания, увеличив количество опорных точек; кроме того, они позволяют сравнить точность, получаемую по одному и тому же набору данных с использованием RPC и универсальными методами (см. схемы XI-XII).
Схемы VIII и IX позволяют оценить границы достижимой точности в данном проекте; в некотором смысле они показывают, насколько имеющиеся точки с известными координатами местности «вписываются» в тестируемую геометрическую модель.
Схемы X-XIII посвящены универсальным моделям, причем в случае схемы X рассматривается случай, когда имеется минимальный необходимый для применения универсальных методов объем данных, а схемы XI-XIII привлекают рекомендуемое для соответствующих моделей число опорных точек.
Для выявления роли связующих точек при обработке стереопар и триплета снимков сравниваются результаты уравнивания по схемам I и II, кроме того в случае триплета уравнивание по остальным схемам выполнялось как с учетом связующих точек, так и без них.
Исследования выполнялись отдельно для одиночных снимков (три снимка), стереопар, которые можно из них составить (три стереопары) и триплета. После приведения конфигурации проекта в соответствие с применяемой схемой, выполнялось его уравнивание и оценивалась точность полученных результатов, используя опорные и контрольные точки.
Для повышения достоверности полученных результатов, при уравнивании в системе PHOTOMOD значение параметра «Пороговое приращение координат (пикс.)», определяющего момент прекращения итераций, было уменьшено по сравнению со значением по умолчанию до 0.0001.
При выполнении уравнивания отбраковка точек с большими ошибками не производилась.
Таблица 2. Схемы уравнивания, применявшиеся в различных экспериментах
| № схемы | Число опорных точек | Геометрическая модель | Цель эксперимента |
| I | 0 | RPC | Оценка точности исходных RPC (без использования опорных точек) |
| II | 0 | RPC +сдвиг | Оценка точности, достижимой с использованием исходных RPC и связующих точек |
| III | 1 | RPC+сдвиг | Оценка точности, достижимой с использованием RPC по единственной опорной точке |
| IV | 4 | RPC+ аффинная поправка | Оценка точности, достижимой с использованием RPC по минимально-избыточному набору опорных точек с введением аффинной поправки |
| V | 4 | RPC+ сдвиг | Сравнение эффективности сдвига и аффинной поправки в RPC при использовании набора опорных точек предыдущей схемы |
| VI | 10 | RPC+ сдвиг | Выяснение целесообразности увеличения числа опорных точек при использовании поправки типа сдвиг |
| VII | 10 | RPC+ аффинная поправка | Выяснение целесообразности увеличения числа опорных точек при использовании аффинной поправки |
| VIII | все имеющиеся | RPC+ сдвиг | Оценка наилучшей достижимой точности при использовании RPC и поправки типа сдвиг |
| IX | все имеющиеся | RPC+ аффинная поправка | Оценка наилучшей достижимой точности при использовании RPC и аффинной поправки |
| X | 4 | Аффинная | Оценка точности аффинной универсальной модели при использовании минимального достаточного набора опорных точек, и сравнения с точностью ориентирования по RPC (набор опорных точек тот же, что и в схемах III и IV). |
| XI | 10 | Параллельно-перспективная | Оценка точности различных универсальных моделей, и сравнения с точностью ориентирования по RPC (набор опорных точек тот же, что и в схемах V и VI ). |
| XII | 10 | DLT | |
| XIII | 10 | Аффинная |
3. Эксперименты по одиночным снимкам
Результаты выполненных экспериментов приведены в Таблицах 3-5.
Таблица 3. Снимок phr1a_p_201306010719533_sen_624609101-001
| Схема | Число опорных точек | Геом. модель | СКО по оп. точкам, м | MAX по оп. точкам, м | Число контр. точек | СКО по контр. точкам, м | MAX по контр. точкам, м |
| I | 0 | RPC | - | - | 33 | 3.1 | 4.9 |
| III | 1 | RPC+сдвиг | 0.0 | 0.0 | 32 | 1.0 | 2.3 |
| IV | 4 | RPC+афф. | 0.4 | 0.5 | 29 | 1.0 | 1.9 |
| V | 4 | RPC+сдвиг | 0.6 | 0.8 | 29 | 1.0 | 2.0 |
| VI | 10 | RPC+сдвиг | 0.7 | 1.0 | 23 | 1.1 | 1.9 |
| VII | 10 | RPC+афф. | 0.7 | 1.0 | 23 | 1.1 | 1.9 |
| VIII | 33 | RPC+сдвиг | 1.0 | 2.2 | 0 | - | - |
| IX | 33 | RPC+афф. | 0.9 | 2.3 | 0 | - | - |
| X | 4 | аффинная | 0.0 | 0.0 | 29 | 2.6 | 4.2 |
| XI | 10 | пар.персп. | 0.8 | 1.3 | 23 | 2.2 | 3.9 |
| XII | 10 | DLT | 1.2 | 1.7 | 23 | 1.9 | 3.0 |
| XIII | 10 | аффинная | 1.6 | 2.4 | 23 | 1.8 | 3.4 |
Таблица 4. Снимок phr1a_p_201306010720166_sen_624610101-001
| Схема | Число опорных точек | Геом. модель | СКО по оп. точкам, м | MAX по оп. точкам, м | Число контр. точек | СКО по контр. точкам, м | MAX по контр. точкам, м |
| I | 0 | RPC | - | - | 38 | 3.9 | 4.6 |
| III | 1 | RPC+сдвиг | 0.0 | 0.0 | 37 | 0.8 | 1.5 |
| IV | 4 | RPC+афф. | 0.1 | 0.2 | 34 | 0.7 | 1.7 |
| V | 4 | RPC+сдвиг | 0.3 | 0.4 | 34 | 0.7 | 1.5 |
| VI | 10 | RPC+сдвиг | 0.6 | 0.9 | 28 | 0.7 | 1.3 |
| VII | 10 | RPC+афф. | 0.5 | 0.8 | 28 | 0.7 | 1.3 |
| VIII | 38 | RPC+сдвиг | 0.6 | 1.4 | 0 | - | - |
| IX | 38 | RPC+афф. | 0.6 | 1.2 | 0 | - | - |
| X | 4 | аффинная | 0.0 | 0.0 | 34 | 4.5 | 7.6 |
| XI | 10 | пар.персп. | 2.0 | 4.1 | 28 | 2.5 | 4.4 |
| XII | 10 | DLT | 0.8 | 1.2 | 28 | 1.5 | 3.0 |
| XIII | 10 | аффинная | 2.8 | 4.8 | 28 | 2.8 | 5.7 |
Таблица 5. Снимок phr1a_p_201306010720273_sen_624611101-001
| Схема | Число опорных точек | Геом. модель | СКО по оп. точкам, м | MAX по оп. точкам, м | Число контр. точек | СКО по контр. точкам, м | MAX по контр. точкам, м |
| I | 0 | RPC | - | - | 38 | 4.2 | 5.4 |
| III | 1 | RPC+сдвиг | 0.0 | 0.0 | 37 | 0.9 | 1.8 |
| IV | 4 | RPC+афф. | 0.1 | 0.2 | 34 | 0.8 | 2.1 |
| V | 4 | RPC+сдвиг | 0.3 | 0.3 | 34 | 0.8 | 2.1 |
| VI | 10 | RPC+сдвиг | 0.5 | 0.9 | 28 | 0.7 | 1.8 |
| VII | 10 | RPC+афф. | 0.5 | 0.8 | 28 | 0.7 | 1.9 |
| VIII | 38 | RPC+сдвиг | 0.7 | 1.8 | 0 | - | - |
| IX | 38 | RPC+афф. | 0.6 | 1.7 | 0 | - | - |
| X | 4 | аффинная | 0.0 | 0.0 | 34 | 6.6 | 11.3 |
| XI | 10 | пар.персп. | 2.8 | 5.8 | 28 | 3.7 | 6.3 |
| XII | 10 | DLT | 1.9 | 2.6 | 28 | 2.3 | 4.7 |
| XIII | 10 | аффинная | 3.9 | 6.5 | 28 | 4.0 | 7.9 |
По результатам проведенных экспериментов можно сделать следующие выводы:
- СКО вычисленного по исходным RPC планового положения контрольных точек составило 3.1-4.2 м. Следует отметить, что эти значения соответствуют спецификации компании ASTRIUM GEO-Information Services CE90 = 8.5 м. (см. Pléiades Imagery - User Guide)
- Используя единственную опорную точку на снимок и вычисляя по ней поправку типа сдвиг в исходные RPC, можно добиться точности 0.8-1.0 м (СКО по контрольным точкам). Учитывая пространственное разрешение снимков, и точность выполнения измерений по снимкам, при использовании любого метода уравнивания вряд ли можно рассчитывать на получение результатов существенно более высокой точности.
- Использование 4 опорных точек позволяет достичь точности 0.7-1.0 м, применяя как поправку типа сдвиг, так и аффинную поправку в RPC. Дальнейшее увеличение числа опорных точек улучшить этот результат не позволяет.
- Точность, достигаемая при использовании универсальных методов и достаточного (не минимального) количества опорных точек колеблется в гораздо широких пределах, в два-четыре раза уступая по точности случаю применения RPC с поправкой типа сдвиг, вычисляемой по единственной опорной точке, но всё же несколько превосходя вариант использования исходных RPC. Результаты применения аффинного универсального метода с минимальным необходимым количеством опорных точек может даже уступать исходным RPC по точности.
4. Уравнивание триплета с использованием связующих точек и без них
Поскольку на триплете влияние связующих точек должно быть особенно заметно (по сравнению со стереопарами), именно эксперименты, описанные в данном разделе, наиболее показательны с точки зрения выявления роли связующих точек.
Следует отметить, что не все связующие точки были измерены на всех трех снимках; из-за проблем опознавания часть из них измерена лишь на двух снимках из трех.
Полученные результаты приведены ниже в Таблицах 6 и 7. Эти данные позволяют сделать следующие выводы:
- СКО вычисленного по исходным RPC планового положения контрольных точек составила 3.6 м при использовании связующих точек, и 3.8 м без них; СКО определения высоты в обоих случаях составила 2.2 м. Таким образом, в данном проекте вовлечение в уравнивание связующих точек приводит лишь к незначительному повышению точности.
- Тенденция незначительного изменения точности при использовании связующих точек сохраняется и при следовании другим схемам уравнивания, использующим в качестве основы геометрической модели RPC. Так как эти схемы, в отличие от упомянутых в предыдущем пункте схем I и II, подразумевают также и использование опорных точек, влияние последних еще больше нивелируют роль связующих точек. Различия не выходят за пределы единицы последнего знака, что может являться просто результатом округления значений.
- Используя единственную опорную точку на снимок и вычисляя по ней поправку типа сдвиг в исходные RPC, можно добиться точности 0.7-0.8 м в плане и 2.2-2.3 м по высоте (СКО по контрольным точкам). Увеличение числа опорных точек до 4 позволяет незначительно улучшить точность по высоте – до 2.0-2.1 м, причем аффинная поправка в RPC не имеет существенных преимуществ перед сдвигом. Дальнейшее увеличение числа опорных точек неэффективно.
- Точность уравнивания универсальными методами крайне низка и может значительно (в десятки раз) уступать точности уравнивания по RPC без опорных точек. Не будет преувеличением сказать, что универсальные методы непригодны для трехмерной обработки этих снимков.
Таблица 6. Уравнивание триплета без использования связующих точек
| Схема | Число опорных точек | Геом. модель | СКО по оп. точкам, м | MAX по оп. точкам, м | Число контр. точек | СКО по контр. точкам, м | MAX по контр. точкам, м | ||||
| dS | dZ | dS | dZ | dS | dZ | dS | dZ | ||||
| I | 0 | RPC | - | - | - | - | 38 | 3.8 | 2.2 | 4.9 | 4.9 |
| III | 1 | RPC+сдвиг | 0.0 | 0.0 | 0.0 | 0.0 | 37 | 0.8 | 2.3 | 1.3 | 5.3 |
| IV | 4 | RPC+афф. | 0.1 | 0.1 | 0.1 | 0.1 | 34 | 0.8 | 2.0 | 2.0 | 4.3 |
| V | 4 | RPC+сдвиг | 0.3 | 1.6 | 0.5 | 2.1 | 34 | 0.7 | 2.1 | 1.5 | 1.4 |
| VI | 10 | RPC+сдвиг | 0.6 | 1.4 | 1.1 | 2.5 | 28 | 0.7 | 2.3 | 1.4 | 4.9 |
| VII | 10 | RPC+афф. | 0.5 | 1.5 | 1.0 | 2.7 | 28 | 0.8 | 2.4 | 1.8 | 5.0 |
| VIII | 38 | RPC+сдвиг | 0.7 | 2.2 | 1.4 | 5.9 | 0 | - | - | - | - |
| IX | 38 | RPC+афф. | 0.6 | 2.1 | 1.2 | 6.1 | 0 | - | - | - | - |
| X | 4 | аффинная | 0.0 | 0.0 | 0.0 | 0.0 | 34 | 13.5 | 51.4 | 36.9 | 125.6 |
| XI | 10 | пар.персп. | 2.5 | 11.5 | 5.5 | 23.7 | 28 | 3.4 | 13.7 | 7.3 | 34.3 |
| XII | 10 | DLT | 0.9 | 3.1 | 2.2 | 6.1 | 28 | 1.9 | 19.1 | 4.9 | 49.3 |
| XIII | 10 | аффинная | 2.4 | 10.3 | 5.1 | 21.4 | 28 | 3.5 | 12.9 | 7.2 | 30.1 |
Таблица 7. Уравнивание триплета с использованием связующих точек
| Схема | Число опорных точек | Геом. модель | СКО по оп. точкам, м | MAX по оп. точкам, м | Число контр. точек | СКО по контр. точкам, м | MAX по контр. точкам, м | ||||
| dS | dZ | dS | dZ | dS | dZ | dS | dZ | ||||
| II | 0 | RPC | - | - | - | - | 38 | 3.6 | 2.2 | 4.5 | 5.7 |
| III | 1 | RPC+сдвиг | 0.2 | 0.6 | 0.2 | 0.6 | 37 | 0.7 | 2.2 | 1.4 | 5.6 |
| IV | 4 | RPC+афф. | 0.1 | 0.1 | 0.1 | 0.1 | 34 | 0.8 | 2.0 | 2.0 | 4.3 |
| V | 4 | RPC+сдвиг | 0.3 | 1.6 | 0.5 | 2.2 | 34 | 0.7 | 2.1 | 1.5 | 4.7 |
| VI | 10 | RPC+сдвиг | 0.6 | 1.4 | 1.1 | 2.4 | 28 | 0.7 | 2.3 | 1.4 | 5.4 |
| VII | 10 | RPC+афф. | 0.6 | 1.4 | 1.1 | 2.4 | 28 | 0.7 | 2.3 | 1.4 | 5.2 |
| VIII | 38 | RPC+сдвиг | 0.6 | 2.1 | 1.2 | 5.0 | 0 | - | - | - | - |
| IX | 38 | RPC+афф. | 0.6 | 2.0 | 1.1 | 5.0 | 0 | - | - | - | - |
| X | 4 | аффинная | 0.0 | 0.0 | 0.0 | 0.0 | 34 | 8.0 | 38.0 | 19.3 | 67.8 |
| XI | 10 | пар.персп. | 4.5 | 28.7 | 9.5 | 64.2 | 28 | 5.0 | 31.9 | 12.6 | 95.2 |
| XII | 10 | DLT | 3.6 | 30.5 | 7.4 | 67.3 | 28 | 4.5 | 34.6 | 11.1 | 106.2 |
| XIII | 10 | аффинная | 4.5 | 30.9 | 9.5 | 70.5 | 28 | 5.4 | 33.8 | 13.6 | 105.8 |
5. Сравнение уравнивания триплета и стереопар
Для данных экспериментов использовались только точки, измеренные на всех трех снимках, чтобы набор точек, по которым уравнивался триплет и каждая из стереопар, был идентичным. Результаты уравнивания приведены в Таблицах 8-11. Уравнивание выполнялось только с использованием RPC, так как нецелесообразность применения универсальных методов была продемонстрирована в предыдущих экспериментах.
Полученные результаты позволяют сделать следующие выводы:
- Точность ориентирования триплета и стереопары, составленной из снимков, полученных с отклонением от надира вперед и назад вдоль трассы (то есть стереопары с наибольшим отношением базиса съёмки к высоте), примерно одинакова.
- Точность ориентирования триплета несколько лучше, чем в случае стереопар, включающих надирные снимки (то есть с отношением базиса съёмки к высоте меньше, чем у крайних снимков триплета), хотя эти различия и нельзя назвать кардинальными.
Таблица 8. Уравнивание триплета
| Схема | Число опорных точек | Геом. модель | СКО по оп. точкам, м | MAX по оп. точкам, м | Число контр. точек | СКО по контр. точкам, м | MAX по контр. точкам, м | ||||
| dS | dZ | dS | dZ | dS | dZ | dS | dZ | ||||
| I | 0 | RPC | - | - | - | - | 25 | 3.6 | 2.0 | 4.5 | 4.9 |
| III | 1 | RPC+сдвиг | 0.0 | 0.0 | 0.0 | 0.0 | 24 | 0.8 | 2.2 | 1.2 | 5.3 |
| IV | 4 | RPC+афф. | 0.1 | 0.1 | 0.1 | 0.1 | 21 | 0.7 | 2.0 | 1.1 | 4.3 |
| V | 4 | RPC+сдвиг | 0.3 | 1.6 | 0.5 | 2.1 | 21 | 0.7 | 1.9 | 1.4 | 4.0 |
| VI | 10 | RPC+сдвиг | 0.6 | 1.3 | 1.2 | 2.1 | 15 | 0.6 | 2.2 | 0.9 | 4.3 |
| VII | 10 | RPC+афф. | 0.5 | 0.6 | 0.8 | 1.2 | 15 | 0.7 | 2.1 | 1.2 | 4.4 |
Таблица 9. Случай стереопары из снимков с отклонениями вперед и назад вдоль трассы
| Схема | Число опорных точек | Геом. модель | СКО по оп. точкам, м | MAX по оп. точкам, м | Число контр. точек | СКО по контр. точкам, м | MAX по контр. точкам, м | ||||
| dS | dZ | dS | dZ | dS | dZ | dS | dZ | ||||
| I | 0 | RPC | - | - | - | - | 25 | 3.5 | 1.9 | 4.5 | 4.3 |
| III | 1 | RPC+сдвиг | 0.0 | 0.0 | 0.0 | 0.0 | 24 | 0.8 | 2.2 | 1.3 | 4.9 |
| IV | 4 | RPC+афф. | 0.1 | 0.2 | 0.2 | 0.2 | 21 | 0.7 | 2.0 | 1.1 | 4.7 |
| V | 4 | RPC+сдвиг | 0.3 | 1.7 | 0.6 | 2.0 | 21 | 0.7 | 1.9 | 1.4 | 3.6 |
| VI | 10 | RPC+сдвиг | 0.7 | 1.3 | 1.2 | 2.2 | 15 | 0.6 | 2.2 | 1.0 | 3.9 |
| VII | 10 | RPC+афф. | 0.5 | 0.7 | 0.8 | 1.1 | 15 | 0.7 | 2.1 | 1.3 | 4.0 |
Таблица 10. Случай стереопары из снимков в надир и с отклонением вперед вдоль трассы
| Схема | Число опорных точек | Геом. модель | СКО по оп. точкам, м | MAX по оп. точкам, м | Число контр. точек | СКО по контр. точкам, м | MAX по контр. точкам, м | ||||
| dS | dZ | dS | dZ | dS | dZ | dS | dZ | ||||
| I | 0 | RPC | - | - | - | - | 25 | 3.3 | 2.6 | 4.2 | 7.7 |
| III | 1 | RPC+сдвиг | 0.0 | 0.0 | 0.0 | 0.0 | 24 | 0.8 | 2.8 | 1.4 | 7.8 |
| IV | 4 | RPC+афф. | 0.0 | 0.6 | 0.0 | 0.8 | 21 | 0.7 | 2.2 | 1.2 | 6.4 |
| V | 4 | RPC+сдвиг | 0.4 | 1.6 | 0.5 | 2.5 | 21 | 0.7 | 2.2 | 1.3 | 6.3 |
| VI | 10 | RPC+сдвиг | 0.6 | 1.5 | 1.0 | 2.4 | 15 | 0.7 | 2.7 | 1.3 | 6.7 |
| VII | 10 | RPC+афф. | 0.5 | 1.0 | 0.8 | 1.6 | 15 | 0.7 | 2.5 | 1.4 | 6.5 |
Таблица 11. Случай стереопары из снимков в надир и с отклонением назад вдоль трассы
| Схема | Число опорных точек | Геом. модель | СКО по оп. точкам, м | MAX по оп. точкам, м | Число контр. точек | СКО по контр. точкам, м | MAX по контр. точкам, м | ||||
| dS | dZ | dS | dZ | dS | dZ | dS | dZ | ||||
| I | 0 | RPC | - | - | - | - | 25 | 4.1 | 3.5 | 4.9 | 9.4 |
| III | 1 | RPC+сдвиг | 0.0 | 0.0 | 0.0 | 0.0 | 24 | 1.0 | 3.0 | 1.7 | 8.0 |
| IV | 4 | RPC+афф. | 0.2 | 1.8 | 0.3 | 2.5 | 21 | 0.7 | 3.4 | 1.5 | 10.1 |
| V | 4 | RPC+сдвиг | 0.4 | 2.7 | 0.6 | 4.0 | 21 | 0.7 | 3.3 | 1.2 | 8.8 |
| VI | 10 | RPC+сдвиг | 0.6 | 2.4 | 1.0 | 4.6 | 15 | 0.7 | 3.3 | 1.4 | 8.0 |
| VII | 10 | RPC+афф. | 0.5 | 2.2 | 0.7 | 4.3 | 15 | 0.7 | 2.9 | 1.5 | 7.8 |
6. Заключение
Подводя итоги проведенных экспериментов, можно сделать следующие выводы:
- При обработке одиночных снимков непосредственно по поставляемым с ними RPC, СКО вычисленного планового положения контрольных точек составляет 3-4 м, что соответствуют спецификации компании ASTRIUM GEO-Information Services CE90 = 8.5 м.
- При обработке одиночного снимка, используя единственную опорную точку на снимок и вычисляя по ней поправку типа сдвиг в исходные RPC, можно добиться точности уравнивания 0.8-1.0 м (СКО по контрольным точкам). Увеличением числа опорных точек или усложнением вида вводимой поправки существенно улучшить этот показатель не удается. Тем не менее, применение дополнительных точек полезно с точки зрения обеспечения избыточности измерений и, как следствие, надежности результатов.
- Точность, достигаемая при использовании универсальных методов колеблется в широких пределах, в два-четыре раза уступая случаю применения RPC с поправкой типа сдвиг, вычисляемой по единственной опорной точке, но всё же несколько превосходя вариант использования исходных RPC.
- При обработке триплета СКО вычисленного по исходным RPC планового положения контрольных точек составила 3.6 м при использовании связующих точек, и 3.8 м без них; СКО определения высоты в обоих случаях составила 2.2 м. Таким образом, вовлечение в уравнивание связующих точек приводит лишь к незначительному повышению точности ориентирования триплета.
- Используя единственную опорную точку на снимок и вычисляя по ней поправку типа сдвиг в исходные RPC, можно добиться точности 0.7-0.8 м в плане и 2.2-2.3 м по высоте (СКО по контрольным точкам). Увеличение числа опорных точек до 4 позволяет незначительно улучшить точность по высоте – до 2.0-2.1 м, причем аффинная поправка в RPC не имеет существенных преимуществ перед сдвигом. Дальнейшее увеличение числа опорных точек, а также применение связующих точек не приводит к повышению точности.
- Точность уравнивания триплета универсальными методами крайне низка и может значительно (в десятки раз) уступать точности уравнивания по RPC без опорных точек. Можно сделать вывод, что универсальные методы непригодны для трехмерной обработки этих снимков.
- Сравнивая точность ориентирования триплета и стереопар, было обнаружено, что в случае стереопары, составленной из снимков, полученных с отклонением от надира вперед и назад вдоль трассы, точность ориентирования примерно одинакова. Точность уравнивания стереопар, включающих надирные снимки, несколько ниже, хотя эти различия и нельзя назвать кардинальными.