















Беспилотные летательные аппараты: применение в целях аэрофотосъемки для картографирования (часть 2).
Тема: беспилотные летательные аппараты
Автор: А.Ю. Сечин, М.А. Дракин, А.С. Киселева, «Ракурс», Москва, Россия. 2011.
Введение
Первая часть статьи «Беспилотные летательные аппараты: применение в целях аэрофотосъемки для картографирования» касалась вопросов общей теории: были рассмотрены существующие типы БПЛА, приведены пояснения основных терминов, связанных с их использованием, а также дан обзор нескольких моделей БПЛА, успешно применяемых при аэрофотосъемке в целях картографирования.Во второй части статьи будут рассмотрены особенности фотограмметрической обработки беспилотной аэросъемки, даны рекомендации по ее проведению и по установке основного и дополнительного оборудования на борт БПЛА для получения максимальной точности.
Особенности данных аэросъемки с БПЛА
Аэрофотосъемка с БПЛА принципиально не отличается от съемки с «больших самолетов», но имеет определенные особенности, которые мы далее рассмотрим. Полет БПЛА, как правило, производится с крейсерской скоростью 70-110 км/ч (20-30 м/c) в диапазоне высот 300-1500 м. Для съемки обычно используются неметрические бытовые камеры с размером матрицы 10-20 мегапикселей. Фокусное расстояние камер обычно составляет около 50 мм (в 35 мм эквиваленте), что соответствует размеру пикселя на местности (GSD) от 7 до 35 см. Часто снимки с БПЛА обрабатываются простыми нестрогими методами (аффинное преобразование снимков на плоскость). В результате, пользователь получает накидные монтажи, которые помимо низкой точности могут содержать разрывы контуров на стыках соседних снимков.
В данной статье при рассмотрении особенностей съемки с БПЛА и составлении рекомендаций по ее проведению мы будем исходить из строгой фотограмметрической обработки данных, в результате которой можно ожидать точность получаемых результатов (как правило, ортофотомозаики) порядка одного GSD. При значениях параметров съемки, указанных выше, результаты соответствуют по точности ортофотопланам масштабов от 1:500 до 1:2000 в зависимости от высоты съемки.
Для строгой фотограмметрической обработки данных аэросъемки и получения максимально точных результатов необходимо, чтобы снимки в одном маршруте имели тройное перекрытие, а перекрытие между снимками соседних маршрутов при площадной съемке составляло не менее 20%. На практике, при съемке с БПЛА эти параметры выдерживаются далеко не всегда. Полет БПЛА не устойчив, на него влияют порывы ветра, турбулентность и другие возмущающие факторы. Если съемку с обычных самолетов планируют с перекрытием вдоль маршрута 60%, а между маршрутами 20-30%, то проектировать съемку с БПЛА следует с перекрытием вдоль маршрутов 80%, а между маршрутами — 40%, чтобы, по возможности, исключить разрывы в фототриангуляционном блоке [2].
На БПЛА, как правило, устанавливаются цифровые камеры Canon. Это связано с легкостью электронного управления камерами этой фирмы. Использование бытовых камер имеет как преимущества (невысокая стоимость, легкость замены при «жесткой посадке»), так и недостатки. Основным недостатком является то, что бытовые камеры изначально не откалиброваны — неизвестны их точные фокусные расстояния, главная точка, дисторсия. При этом нелинейные искажения оптики (дисторсия), допустимые при бытовой съемке, могут составлять до нескольких десятков пикселей, что на порядок снижает точность результатов обработки. Однако, такие камеры могут быть откалиброваны [1] в лабораторных условиях, что позволяет получать точности обработки, практически такие же, как и для профессиональных малоформатных фотограмметрических камер.
Предпочтительней устанавливать на такие камеры объективы с фиксированным фокусным расстоянием. При съемке следует выставлять фокусировку на бесконечность и отключать функцию «автофокуса».
Второй недостаток используемых на БПЛА камер относится конкретно к камерам Canon — в них, в отличие от профессиональных фотограмметрических камер, используется щелевой затвор, в результате чего экспозиция разных частей изображения производится в разные моменты времени и соответствует разным положениям носителя. Так, если выдержка при съемке составляет 1/250 c, то при скорости БПЛА в 20 м/с смещение камеры при съемке кадра составляет 8 см, что сравнимо с разрешением съемки на малых высотах и вызывает дополнительную систематическую ошибку в снимке. Такие ошибки могут накапливаться в процессе фотограмметрического сгущения (уравнивании) при съемке протяженных территорий. Для того, чтобы уменьшить влияние этого эффекта и для ликвидации «смаза» снимков, следует осуществлять съемку с БПЛА с наименьшими возможными выдержками (не длиннее 1/250 c, максимальная выдержка зависит от высоты). Частично проблему щелевого затвора могли бы решить камеры с центральным затвором, имеющие сравнимое с камерами Canon качество объектива и матриц. Тем не менее, чтобы избежать «смаза», выдержки все равно следует ограничивать.
Снимки цифровых камер, как любительских, так и профессиональных, имеют прямоугольную форму. «Выгоднее» располагать камеру так, чтобы длинная сторона снимка располагалась поперек полета — это позволяет снимать большую площадь при той же длине маршрута. Съемку следует производить с максимальным качеством — с наименьшим jpeg сжатием или в RAW, если последнее возможно.
Современный уровень развития навигационных средств позволяет производить измерения элементов внешнего ориентирования (ЭВО) непосредственно в процессе съемки. Типичные точности таких измерений достигают единиц сантиметров по пространственным координатам X,Y и Z и 0.005 градуса по углам крена, тангажа и рысканья для самых точных систем Applanix POS AV, устанавливаемых на «большие самолеты». Часто этого достаточно, чтобы производить обработку без использования опорных точек. В любом случае, наличие таких данных значительно упрощает обработку и позволяет выполнять некоторые этапы обработки полностью в автоматическом режиме. Современные достижения микроэлектроники позволяют собрать механический (точнее MEMS — электронно-механический) гироскоп в корпусе размером в несколько мм, стоимостью от 250 $. Такие гироскопы не дают точность профессиональных, имеют значительный уход (порядка одного градуса за час) при эксплуатации, но существенно упрощают последующую обработку данных. При типовых поставках Птеро E4, Дозор 50 на борт могут быть установлены такие малогабаритные инерциальные системы — IMU (на Дозор-50 ставится IMU разработки ООО «Транзаз Телематика») и высокоточные двухдиапазонные GPS (TOPCON euro 160 на Птеро-E4, встроенный ГЛОНАСС/GPS приемник на Дозор-50). Паспортная точность этих GPS приборов составляет 10 мм + 1,5 мм × B (B — удаление до базовой станции в км) в плане и 20 мм + 1,5 мм × B по высоте. К сожалению, обычно на борт БПЛА устанавливают более дешевые GPS приемники и не устанавливают IMU датчики. Данные о центрах проекции снимков в телеметрической информации снимаются через протокол NMEA и имеют в таком случае точность до 20-30 м, а углы тангажа, крена и рысканья вычисляются через вектор скорости GPS измерений. Точность угла рысканья в такой телеметрической информации невысокая и может превышать 10 градусов, а сами значения содержат систематические ошибки, что усложняет последующую обработку данных.
Если при съемке использовался двухдиапазонный GPS приемник в дифференциальном режиме (или PPP обработка данных GPS), то требуется минимальное число опорных точек для получения наиболее точных результатов обработки, обычно достаточно 1-2 точки на 100 снимков, в ряде случаев обработку можно проводить без опорных точек. В случае, когда нет точных центров проекции, требования к планово-высотному обоснованию стандартные: одна планово-высотная точка на 6-10 базисов съемки.
Специфика фотограмметрической обработки данных аэросъемки с БПЛА
Обработка аэрофотосъемки с БПЛА в цифровых фотограмметрических системах (ЦФС) в целом аналогична обработке аэрофотосъемки с «больших самолетов». Однако особенности данных с борта БПЛА часто не позволяют использовать автоматические процедуры стандартных пакетов — часть операций (например, расстановку связующих точек) приходится производить в ручном режиме. Ниже мы рассмотрим особенности обработки аэросъемки с БПЛА в ЦФС PHOTOMOD 5.2. Именно в этой версии PHOTOMOD введены специальные функции для обработки таких данных, существенно упрощающие и автоматизирующие получение конечной продукции. Как и при обработке других данных, сначала в ЦФС создается проект, в него вводятся снимки и телеметрическая информация. На основании данных о центрах проекции и углах производится создание накидного монтажа, разбивка по маршрутам. Снимки, попавшие на развороты БПЛА, удаляются в ручном режиме. Неточные угловые элементы внешнего ориентирования приводят к достаточно грубому накидному монтажу (Рис. 1):
Рис. 1. Накидной монтаж по телеметрической информации
Автоматический поиск связующих точек в таких случаях затруднен или требует значительного времени работы компьютера. Для уточнения накидного монтажа в таких случаях в ЦФС PHOTOMOD используется т.н. «автоматический накидной монтаж», который уточняет взаимное расположение снимков (Рис. 2).
Рис. 2. Накидной монтаж после автоматического уточнения
Как мы ранее отмечали, съемка с борта БПЛА производится с увеличенными перекрытиями. Нестабильность полета летательного аппарата иногда может привести к очень большим перекрытиям между соседними снимками, что вызывает сложности в стандартных фотограмметрических пакетах.
Рис. 3. «Перепутывание» снимков при маленьком базисе съемки
Разные углы и высоты съемки соседних кадров приводят к увеличению области поиска связующих точек и увеличению числа грубых ошибок по сравнению со стандартными аэрозалетами. После создания уточненного накидного монтажа выполняется процедура автоматического измерения связующих точек. На первых проходах накидной монтаж опять уточняется:

Рис. 4. Накидной монтаж после первых проходов автоматического измерения связующих точек
На следующих проходах производится доизмерение связующих точек. Несколько проходов необходимы в случае, когда телеметрическая информация не содержит всех углов ориентирования, или углы известны с точностью 10-30 градусов. Если же телеметрическая информация содержит угловые элементы ориентирования с точностью в несколько единиц градуса, то достаточно и одного прохода — надежность автоматических измерений в этом случае повышается. Для борьбы с возможными грубыми ошибками при автоматических измерениях в PHOTOMOD 5.2 введено понятие т.н. «доверительной группы связующих точек», когда программа ищет наибольшее число связующих точек для стереопар с наименьшим поперечным параллаксом, остальные связующие точки, не попавшие в группу, считаются ошибочными.
После измерения связующих и опорных точек производится процедура уравнивания. В ЦФС PHOTOMOD можно использовать начальное приближение для алгоритма уравнивания как по уточненной схеме блока, так и построенное другими методами. Начиная с версии 5.2 для уравнивания аэросъемки с БПЛА мы рекомендуем использовать новый режим — уравнивание 3D. При уравнивании в PHOTOMOD и достаточном числе опорных точек можно использовать самокалибровку. Это дает возможность использования некалиброванных камер. Ожидаемая точность выходных результатов при строгой фотограмметрической обработке составляет приблизительно 1-2 GSD в плане и 2-4 GSD по высоте. После фотограмметрического уравнивания, результаты которого и определяют точность выходных продуктов, производится построение рельефа (ЦМР) в автоматическом режиме. При необходимости, после уравнивания может быть сделана стереовекторизация — отрисовка в ручном режиме зданий, сооружений, мостов, дамб и других объектов. Построенный рельеф используется для ортотрансформирования снимков. На последнем этапе из ортотрансформированных снимков создается бесшовная мозаика — производится расчет линий порезов, выравнивание яркостей, стыковка контурных объектов. Самокалибровку можно включать и при отсутствии опорных точек, правда, в этом случае можно рассчитать только коэффициенты k1, k2 радиальной дисторсии. При использовании камер с щелевым затвором можно дополнительно включить расчет аффинных искажений. В случае стабильности углов ориентирования при съемке такая самокалибровка может повысить точность уравнивания.
Если используется некалиброванная камера и отсутствуют опорные точки, то можно говорить о точности в несколько десятков метров, которая будет определяться точностью GPS центров проекций и дисторсией объектива (до нескольких десятков пикселей). В таких случаях можно применять упрощенную автоматизированную последовательность обработки. Бесшовный накидной монтаж указанной точности при этом получается за счет трансформирования исходных снимков в программе PHOTOMOD GeoMosaic. В этом случае используются простейшие методы трансформирования, не учитывающие рельеф местности, а стыковка контуров осуществляется за счет автоматически рассчитываемых связующих точек вдоль автоматически построенных линий порезов.
Примеры фотограмметрической обработки данных аэросъемки с БПЛА
Рассмотрим несколько примеров обработки аэросъемки с БПЛА. Во всех примерах для обработки использовалась ЦФС PHOTOMOD. Отметим, что различными организациями в компанию «Ракурс» для тестирования было передано более 20 блоков аэросъемки с БПЛА. К сожалению, для многих блоков отсутствовали опорные точки и/или съемка была проведена неоткалиброванными камерами. В таких случаях было невозможно оценить точность конечных результатов обработки.Первый блок, который мы рассмотрим, был снят с борта БПЛА ZALA 421-04ф. Данные для исследований были любезно предоставлены ОАО «Газпром космические системы». Блок состоял из 26 маршрутов. Общее число снимков в блоке составило 595. Использовалась предварительно откалиброванная цифровая камера Canon EOS 500D. Высота залета над местностью составила около 500 м, размер пиксела на местности п риблизительно равен 8 см. На местности были измерены и промаркированы 25 опорных точек, точность координат опорных точек не превышала 10 см. Общий перепад высот местности протяженностью около 3-х километров достаточно большой ~ 70 метров.
Сначала этот же блок аэросъемки был обработан в автоматическом режиме по упрощенной схеме, без уравнивания и использования опорных точек. Привязка осуществлялась по центрам проекции, трансформирование снимков проводилось сразу в программе PHOTOMOD GeoMosaic без учета рельефа. Последующий контроль полученных «псевдо» ортофотопланов по опорным точкам показал расхождения на опорных точках, превышающие 17 м. Такая невысокая точность ортофотплана обусловлена как большим перепадом высот, так и неточностью измерений центров проекций в полете.
Затем блок был подвергнут строгой фотограмметрической обработке. При уравнивании три из измеренных опорных точек считались контрольными. Среднеквадратическая ошибка уравнивания составила по опорным точкам 15 см, 16 см, 12 см, по контрольным точкам 23 см, 29 см и 57 см. Расхождения на связующих точках составили 8 см, 14 см и 69 см. Общий вид блока представлен на следующем рисунке.
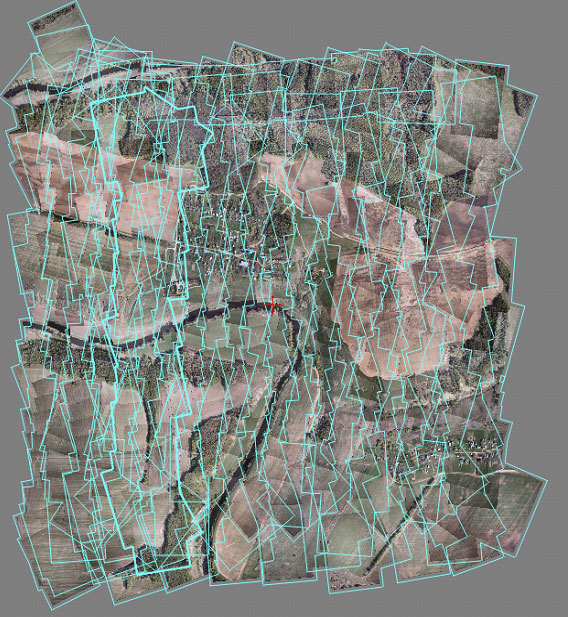
Рис. 5. Общий вид «блока 1»
В процессе уравнивания было обнаружено, что координаты центров проекций из телеметрической информации содержат систематическую ошибку, главная из компонент которой составляет 10,5 метра по высоте Z. Среднеквадратические ошибки на центрах проекции после вычитания систематической ошибки составили 84 см, 239 см и 75 см. Существенно большая ошибка по Y (вдоль полета), скорее всего, связана с неточным определением моментов съемки в телеметрии. Большие ошибки по Z на связующих точках возможно связаны с неточной калибровкой камеры и с накопленной ошибкой при съемке камерой с щелевым затвором. Наибольшие ошибки на связующих точках наблюдаются на краях и в углах снимков.
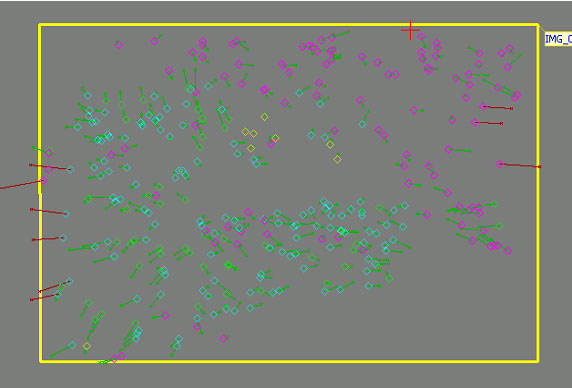
Рис. 6. Величины ошибок на связующих точках
Дальнейшая обработка блока проводилась по стандартной схеме. Был построен рельеф в автоматическом режиме и сделано ортотранформирование с учетом построенного рельефа. Фрагмент построенного ортофото приведен на следующем рисунке. При построении этого фрагмента специально не включалась функция выравнивания яркости для демонстрации совпадения контуров соседних снимков.

Рис. 7. Фрагмент ортофотоплана без выравнивания яркости
В апреле 2011 кафедрой фотограмметрии Московского государственного университета геодезии и картографии (МИИГАиК) были проведены исследования материалов аэрофотосъёмки, полученных с помощью БПЛА Птеро, с целью оценки качества аэросъёмочных работ и фотограмметрической обработки [3]. Съемка выполнялась с высоты около 900 м над средней плоскостью снимаемой местности с борта БПЛА Птеро цифровой фотокомерой Canon EOS 5D. Камера была предварительно откалибрована. Для оценки качества материалов использовался фрагмент блока, состоящий из 2-х маршрутов по 6 снимков в каждом. В качестве опорных использовались 14 точек, плановые координаты XY которых были сняты с планов масштаба 1:1000, а высота Z определялась по материалам воздушного лазерного сканирования, выполненного с точностью около 20-30 см. После фотограмметрического уравнивания среднеквадратические погрешности координат на опорных точках составили по X, Y и Z соответственно 20 см, 21 см и 50 см. Среднеквадратические погрешности координат связующих точек составили 6 см, 6 см, 15 см. Размер пиксела на местности для этого блока GSD составляет около 12 см. Общая схема блока показана на следующем рисунке.
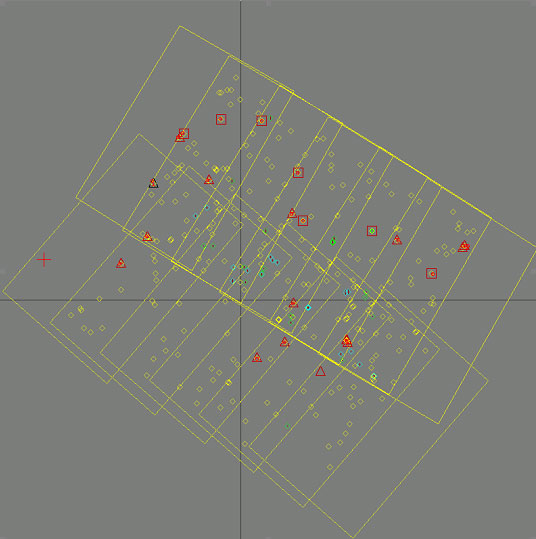
Рис. 8. Схема «блока 2» с опорными и связующими точками
Вопросы метрологического обеспечения
В целом, использование БПЛА для аэросъемки и для получения материалов картографической точности показывает экономическую эффективность и является оперативным. Для широкого внедрения такой аэросъемки требуется координация усилий как производителей БПЛА, так и пользователей их эксплуатирующих, а также разработчиков цифровых фотограмметрических систем.Одним из сдерживающих факторов внедрения БПЛА для решения перечисленных выше задач является отсутствие у большинства организаций практического опыта их использования, а также отсутствие теоретически обоснованных рекомендаций по выбору съемочной аппаратуры для БПЛА и параметров выполняемой с их помощью аэрофотосъемки.
Отметим здесь интересный проект МИИГАиК — с целью отработки и исследования технологий мониторинга и картографирования местности по материалам беспилотной аэрофотосъемки, начаты работы по созданию специализированного исследовательского полигона. Этот полигон, площадью около 50 кв. км, создается в Заокском районе Тульской области, на базе учебного геополигона МИИГАиК, расположенного в 110 км от Москвы. Территория полигона представляет собой уникальное многообразие картографических объектов. На этой территории расположены разнообразные населенные пункты: поселок городского типа, деревни, дачные и коттеджные поселки; дорожная сеть в виде железных, шоссейных, проселочных и полевых дорог; линии электропередачи различного напряжения; трубопроводы. На территории полигона имеются лесные массивы, различные гидрографические объекты, многообразные формы рельефа, сельскохозяйственные угодья и производственные объекты.
С целью обеспечения отработки и исследования технологий, основанных на применении БПЛА, на территории полигона начаты работы по созданию высокоточной сети планово-высотных опознаков (в виде естественных контуров местности и маркировочных знаков); ведется топографическая наземная съемка характерных участков местности в масштабе 1: 500 и 1: 2000. На эту же территорию по материалам аэрофотосъемки и космическим снимкам высокого разрешения созданы ортофотопланы и цифровые модели местности. По мере поступления новых съемочных материалов эти работы предполагается выполнять в дежурном режиме.
Для оценки изобразительных свойств снимков, полученных с помощью БПЛА, на полигоне будут развернуты радиальные миры. Первые испытания планируется провести в середине июля 2011 г. Планируется провести тестовую аэрофотосъемку территории полигона в различных масштабах с помощью отечественного БПЛА «ПТЕРО» с целью отработки и исследования фотограмметрической технологии создания карт различного масштаба по полученным материалам аэрофотосъемки. Фотограмметрическую обработку полученных снимков предполагается выполнить на цифровой фотограмметрической системе PHOTOMOD. В сентябре предполагается провести испытания БПЛА «Х100» бельгийской фирмы Gatewing и БПЛА «Кречет», разработанного в МИИГАиК.
Созданием полигона и проведением на нем испытаний БПЛА и технологий, основанных на их использовании, МИИГАиК намерен помочь потенциальным пользователям освоить и внедрить новые технологии, а разработчикам летательных аппаратов и съемочных систем адаптировать их к решению актуальных задач производства.
Выводы
Использование БПЛА в качестве аэросъемочной платформы имеет большие перспективы при съемке небольших по протяженности площадных объектов и при съемке линейных объектов. Данные с БПЛА позволяют получать качественные картографические материалы (пространственные данные) при следующих условиях:выполнении определенных (вполне посильных) требований к съемочной аппаратуре и процессу съемки (гарантия достаточности перекрытий);
строгой фотограмметрической обработке. Точность при этом возрастает в десятки раз и может составлять около GSD, как и для обычной аэросъемки и космических снимков.
Наши рекомендации для получения максимальной точности результатов съемки предназначены как для пользователей, эксплуатирующих БПЛА, так и для конструкторов, устанавливающих оборудование на беспилотники, и состоят в следующем.
Использовать на БПЛА калиброванные камеры.
Производить съемку с выдержкой не длиннее 1/250с.
Использовать объективы с фиксированным фокусным расстоянием. Если это невозможно, следует фиксировать увеличение (Zoom). Съемка должна производиться с фокусировкой на бесконечность и с отключенным режимом автофокусировки.
Проектировать съемку с увеличенными перекрытиями (80% вдоль, 40% поперек маршрута).
Желательно использовать камеры с центральным затвором.
Желательно использовать двухдиапазонные GPS приемники на борту и дифференциальный режим измерений.
Желательно использование на борту IMU, пусть и не имеющего высокой точности.
Благодарности
Благодарим компании: «Беспилотные системы ЗАЛА АЭРО», ОАО «Газпром космические системы», «АФМ-Серверс», ООО «Геометр-Центр», НПИ и КЦ «Земинформ», ЗАО «Транзас», ЗАО «Лимб» за помощь в подготовке материала, предоставление данных и полезные обсуждения.Литература
1. Чибуничев А.Г., Михайлов А.П., Говоров А.В. Калибровка цифровых фотокамер: Вторая научно-практическая конференция РОФДЗ. Тезисы докладов. М., 2001 г. сc. 38-39.2. Скубиев С.И., Научно-производственный институт земельно-информационных технологий Государственного университета по землеустройству «Земинформ» (Россия), Использование беспилотных летательных аппаратов для целей картографии. Тезисы X Юбилейной международной научно-технической конференции «От снимка к карте: цифровые фотограмметрические технологии». Гаета, Италия, 2010 г.
3. Результаты полевых исследований БПЛА «Птеро».